Now that we had a full Lego prototype of the physical aspect of our project, it was time to turn everything into Delrin!
Well, not quite everything. We decided to use Lego gears since I had learned from my experiences with the Gearbird that it is very difficult to use SolidWorks to make a gear the exact size you want it to be, since you can't select the diameter.
Since we were using Lego gears, everything had to be built EXACTLY to Lego scale. This meant a lot of time spent figuring out the exact dimensions of various Lego parts. As a result, we really learned to love the FLU (fundamental Lego unit, not the illness).
Also, quick side note: We decided to give up on the initial stage one of our creep in the box, the wolf whistle. We felt as if we had enough on our plates with what we were already doing, and it seemed that the only way we would have been able to project a wolf whistle would have been by hooking our robot up to a computer, which seemed rather inconvenient.
Anyway, back to Delrin!
What needed to be done:
Construct a delrin box that would move up and down the linear gear track using its gear trains (which would protrude slightly from the sides). The box structure would also be responsible for stabilizing the scissor mechanism (i.e. stage two), which would rest on top of it.
The box would consist of 4 pieces: top, bottom, and two sides
 |
| (Very) General Plan |
Measurement-wise the sides of the box were the most complex, so I began with them. After close examination of our Lego prototype, it seemed that the sides needed to:
1. Have eight correctly spaced holes (4.8mm for Lego rods) for the gear trains
2. Have one hole (.25mm for a Delrin rod) each to stabilize the base of the scissor mechanism
3. Have two holes (.25mm for a Delrin rod) each, raised above the general structure, to help support the stage two motor
4. Connect via press fit to the top and bottom of the box
Constructing the side on SolidWorks was a long process--it began with step 1 (figuring out the gear dimensions), then continued to steps 2 and 3 (finding exact measurements for stabilization rods), and finally step 4 (figuring out press fit dimensions).
To figure out the spacing of the gear holes, I built this visual aid:
The wonders of the internet gave me all of the information I needed to know about Lego dimensions: 4.8mm holes, 3.2mm between holes, 5.5mm between the last hole and the end, and 9.6mm height. With these dimensions, I was ready!
Below is the process of making the side of the inner box, and the final SolidWorks version:
Some press-fit trial and error took place on small, sample pieces of Delrin so that the press-fit dimensions on the much larger box pieces would be correct.
 |
| Press fit trial and error |
 |
| SolidWorks side part with added press fit protrusions |
If you look back at the general plan:
The press fit protrusions were on the top and bottom of the box, and the holes were in the sides. I reversed the placement of the protrusions and holes so that the top and bottom of the box could lift on and off if necessary, instead of being forced to pull the sides apart, which would be covered with gears.
Clara and I decided to wait until slightly later to design and print out the top of our box, since we wanted to use press fit pieces to help stabilize stage 2. In the meantime, we printed out the two sides and the base.
 |
| Sketch of one side and bottom |
Miraculously, the sides were dimensioned correctly and fit the gears on the first try!!
 |
| SUCCESS! |
 |
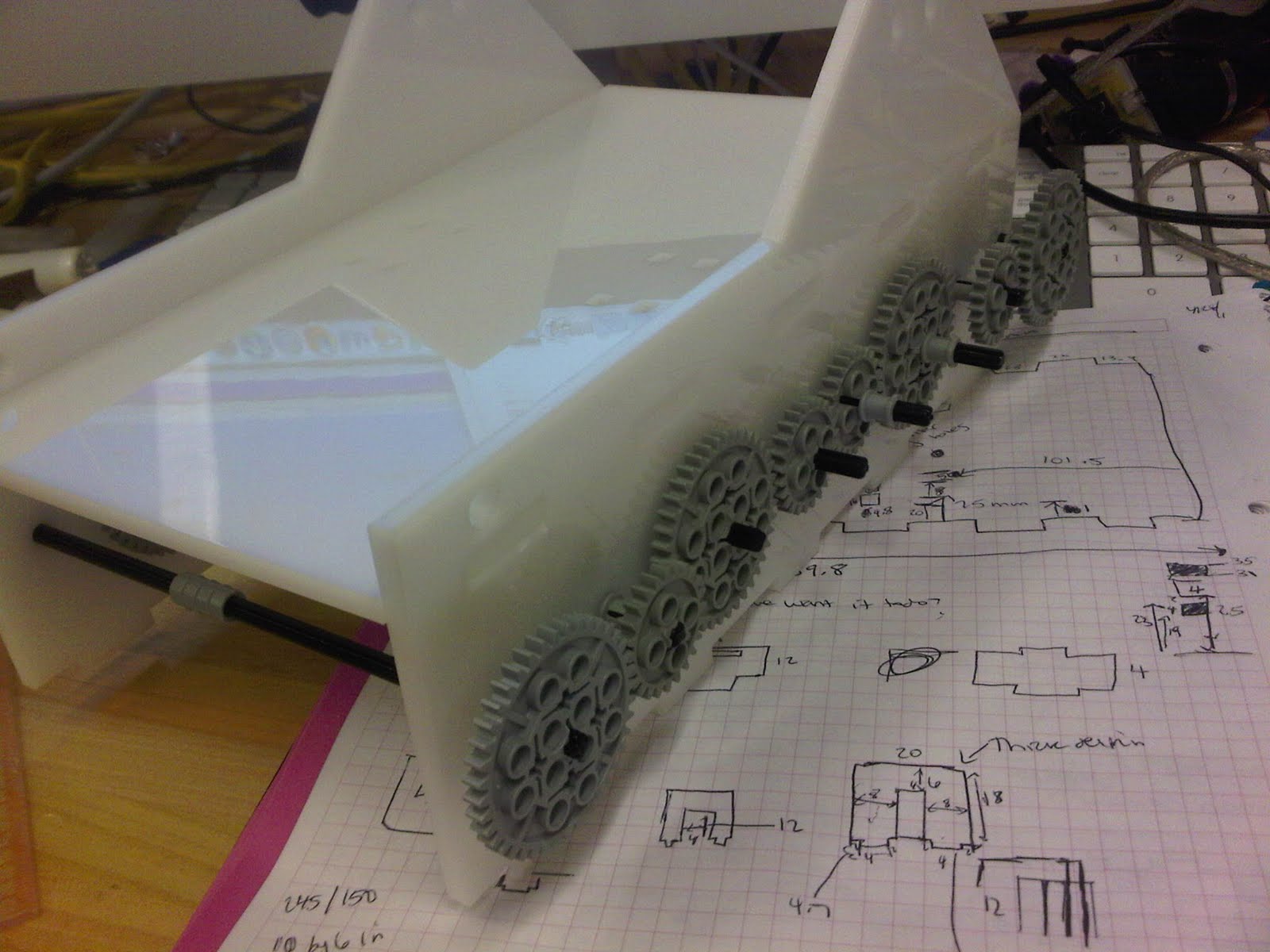
| The inside of the inner box |
Since all of the gears are connected to one motor, they will be turning at the same speed as their mirror image gear on the other side of the box. The rods between the gears in the picture above are for added stabilization. It turned out that these rods alone did not provide enough stabilization, and at a later stage in our building I added some more:
 |
| Stabilized! |
All the measurements were based exactly on the Lego model, which is how I was able to figure out how to place the non-gear holes in the box's side. The one measurement we did change was the width of the box, since we wanted a bigger base for our creep.
In the meantime, Clara had been building a delrin version of the scissor mechanism. This involved printing many Delrin donuts and scissor pieces (almost all identical, with two shorter pieces), and attaching them with small pieces of Delrin rod. She too had used exact Lego measurements, so that the scissor mechanism would line up exactly with its stabilization holes in the box's sides.
 |
| Laser cutting pieces |
 |
| Scissor gear, before the donuts had been converted to delrin (these donuts were far too heavy for our mechanism) |
 |
| In the process of converting |
Again, miraculously, this stage 2 mechanism lined up exactly with the holes! Clara and I realized that we clearly had a previously undiscovered talent for measuring things.
Here is a sketch and SolidWorks drawing of the top:
The small holes are for tiny press fit arch supports to keep the forward-motion part of the scissor mechanism moving forward. Without the small arches, the pieces popped up a little bit, reducing the strength of our pop.
 | | |
| Press-fit test for arch |
|
 |
| Arch size check--the piece needed to be able to freely slide back and forth |
 |
| Top in place! (If you look closely, you can see the tiny arch holes) |
 |
| Full box! |
Now that all of the pieces had been printed, we were finally able to assemble our mechanism for the first time!
 |
Everything fit!
 |
| Popping! |
|
We were very excited to see that everything fit. We did see however, that the motor still desperately needed to be stabilized. We remedied this in two ways:
1. The Lego rods were very flimsy. Additionally, rather than being at the same height, one of the bars should have been slightly lower in order to hold the motor at the right angle. We didn't want to completely reprint both sides, which would also entail reassembling all of the gears, so we found an alternate solution: steel rods!
The steel rod was of course much stronger than the Lego rod, but we could only put in one since steel doesn't bend like Lego does, and our second support rod needed to bend because its hole placement was slightly off. It turned out though that the second support rod was not even necessary--the steel was so strong that it did the job by itself!
2. The motor still slid from side to side, so we decided to print a larger version of the tiny stabilization arch to go over the motor and hold it in place. This required re-printing a new top with added holes for the additional arch. The motor was under a lot of strain, so to ensure the arch support did not pop out of the top, we decided to connect it like this, instead of just with the traditional press-fit:
 |
| Solidworks drawing |
The piece goes all the way through the top, where it can be secured from below with a Lego rod.
We printed the arch and a new base. Once again, everything fit, which made us very excited. The arch did a great job of holding down the motor.
 |
New arch!
 |
| Just one arch was necessary! |
|
 |
New Solidworks top!
 |
| Solidworks Drawing |
|












































































{kind=link}
{kind=link}